






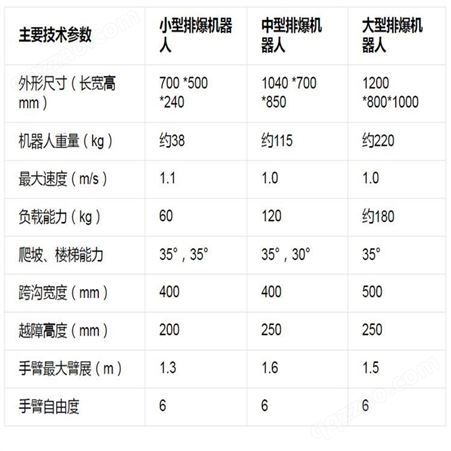

外形尺寸 | 长1040mm×宽700mm×高850mm |
*机器人重量 | 车体88KG 手臂30KG |
负载能力 | 水平地面不小于120Kg |
*行走速度 | 0-1m/s,远程控制无级变速 |
转向半径 | 原地旋转 |
机身 | 航空级铝合金,精密加工 |
*爬坡、楼梯能力 | 不小于35°(斜坡)、不小于30°(楼梯) |
跨沟宽度 | 400mm |
越障高度 | 250mm |
防护等级 | IP65,全天候 |
*工作时间 | 2-4小时巡航(视不同速度) |
通讯 | 无线500m可视距离内可控。同时可选配模拟、WiFi、3G三种方式传输语音和图像 |
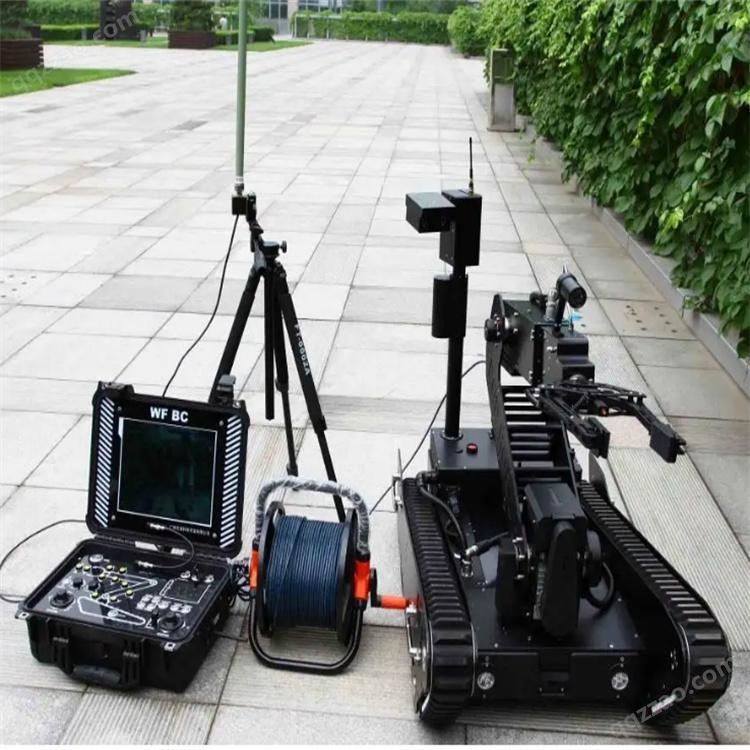
*摄像头 | 前视、手爪上、手爪下、监控云台共4路红外CCD相机 监控摄像头可控变焦,低照度、带红外滤除功能和红外光照明 |
照明 | 前视高亮LED,监控高亮LED |
*传感器 | 2路超声、1路陀螺仪、1路加速度计、1个GPS、3路温度传感器 |
水炮接口 | 提供水炮枪安装接口,可直接安装水炮枪及激光瞄准仪 |
*安全性 | 带有急停刹车开关 |
*电池 | 动力电池与控制电池分离,动力电池36V |
2、机械手臂 |
|
*模块化 | 模块化设计,可以快速从车体上拆卸 |
臂展 | 1.6m |
*独立自由度 | 6个独立自由度 肩部旋转:360° 肩部摆动:170° 大臂摆动:210° 小臂摆动: 180° 爪旋转:360°连续 爪张开:0-250mm |
*抓持能力 | 8-15KG |
*手爪配件 | 四套快速更换的手爪及工具,更换方便快捷 |
产品特点:
l 越障能力强,鳍臂式履带结构,使机器人轻松翻越楼梯、沟壑等障碍。
l 运动速度快,相当于人小跑速度,无级变速,低速状态下同样具备较大扭矩。
l 体积小、重量轻,可单人背负,可放入轿车后备箱内,运输方便。
l 一体化机械臂云台,7+2自由度设计,抓取、观察更加灵活。
l 模块化设计,电池模块、云台模块、机械臂模块可快速拆卸、更换,方便维护。
l 防护性强,防尘、防水、防震、防腐蚀,各项性能指标均达到标要求。
l 智能程度高,具备一键展开、一键复位、辅助抓取、辅助越障等多种智能操作功能。
技术指标:
机器人本体参数
参数名称 | 参数指标 |
外形尺寸 | 820×550×430mm(手爪闭合) |
自重 | ≤40kg(包含2块电池,总容量24V,20AH;有线线缆盒) |
机器人负载能力 | ≥70kg |
速度 | ≥1.5m/s,远程控制无级变速 |
转向半径 | 原地旋转 |
越障能力 | ≥200mm障碍|≥35°楼梯|≥35°斜坡,能适应草地、沙地、雪地、碎石等环境 |
工作时间 | 2小时巡航 |
防护等级 | IP65 |
有效摆臂长度 | ≥160mm |
有效摆臂角度 | 0°~+360° |
机械臂自由度 | 7+2自由度 |
机械臂重量 | ≤15kg |
云台外挂能力 | 0.5kg(伸展) |
底座旋转角度 | -120°~+120° |
大臂俯仰角度 | 10°~180° |
小臂俯仰角度 | 20°~180° |
手腕旋转角度 | -150°~+150° |
手爪抓持范围 | 3~170mm(不小于该范围) |
云台俯仰角度 | -0°~+90° |
云台旋转角度 | 0°~+360° |
行车摄像云台 | -20~+30° |
手臂抓取能力 | ≥10kg(回收) |
≥3kg(伸展) | |
竖直抓取高度 | ≥1350mm |
水平抓取距离 | ≥1200mm |
云台观察高度 | ≥2000mm |
摄像头数量 | 4 |
行车摄像头 | 彩色CCD相机,高亮LED照明,红外感应夜视 |
手爪前视摄像机 | 彩色CCD相机,红外感应夜视 |
手爪后视摄像机 | 彩色CCD相机,红外感应夜视 |
云台摄像机 | 36倍光学变焦,高亮LED照明,红外感应夜视 |
云台机械扩展接口 | 与皮卡汀尼导轨通用接口 |
电器扩展插头 | 1路RS485 1路图像接口 1路24V/10A供电 1路12V/5A供电 |
通讯 | 无线通讯:≥200m(室外空旷环境) |
有线通讯:≥100m(室外空旷环境) | |
增程天线:≥500m(室外空旷环境) | |
挂接工具 | 可定制专用接口与工具(如暴炸物销毁器,模拟控制系统等设备) |
控制器参数
参数名称 | 参数指标 |
控制箱尺寸 | 470×350×180mm |
控制箱重量 | ≤12kg |
显示屏尺寸 | 12英寸高亮度液晶 |
显示图像 | 同时监控4路视频信号或单独放大其中1路 |
输出接口 | Av-out接口,可外接显示器或录制设备 |
工作时间 | ≥3小时 |
电池容量 | 12V 9A高容量电池 |






所有评论仅代表网友意见,与本站立场无关。