









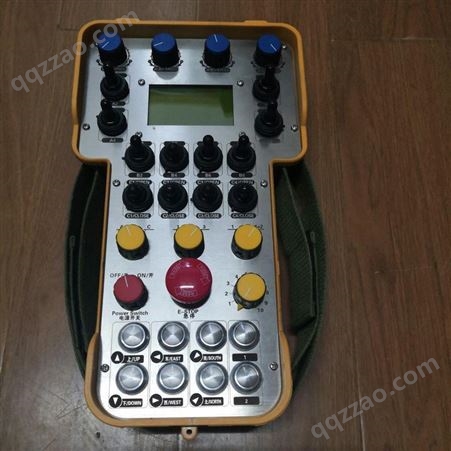
帝淮双摇杆四驱小车无线遥控器说明
双摇杆四驱小车无线遥控器,整套包含1台发射器+1台接收器,遥控距离按照100米提供,接收器端设计为RS485输出,与被控端PLC之485接口以Moudbus协议通信,开关量信号对应点动或保持模式定值数字信号输出,模拟量信号对应连续变化的数字信号输出。
1)2个单轴摇杆,均为模拟量模式,推动的幅度越大速度越快。单轴一字型摇杆,设定死区临界角,超过临界角度,才开始执行动作,首先启动开关量动作信号的触发,继续推动则对应此路开关量方向的无极调速。2个单轴摇杆总计对应4路开关量信号、2路模拟量信号控制。1个单轴比例杆推动的幅度大,1个单轴比例杆推动的幅度小,则在运动中差速转弯;1个推动另1个不推动,则就地绕不动的摇杆一侧中心轴点转圈;1个前推1个后推,则小车就地正反转。
左侧前后2个轮子视为一个,右侧前后2个轮子视为一个,2个摇杆,一个用于控制左驱,一个用于控制右驱,按照上述操作方式进行小车底盘的整体控制。
2)针对6节机械臂控制,布局1个6档位波段旋转选择开关,用于选中是第几节臂,每个选择位对应接收器端1个定值保持模式数字信号输出。
另布局1个三位自复位拨杆,用于控制每节臂的升降动作,拨杆具备前中后3个位置,中间零位不对应输出,前后2个位置各对应接收器端1路自复位模式数字信号输出。
3)备用按键2个,全部设计为点动模式,不设定互锁逻辑,便于后端自定义处理。
4)启动+急停旋钮,急停对应2路继电器输出含1路常开点+1路常闭点,常规使用常开点,常闭点作为备用。启动即为启动发射器本身电源开关,同时对应接收器端输出控制回路的接通,此时被控端设备通电,急停拍下,则可瞬间切断所有输出。发射器端的启动按钮关闭,发射器端电源关掉,且5秒钟后,接收器端亦可自我急停,保障安全!
本次双摇杆四驱小车无线遥控器非标定制型号DH-Z2YL6XBZ2F485(DC24V/100米 /RS485输出/1发1收)









所有评论仅代表网友意见,与本站立场无关。